Драйвер шагового двигателя - электронное устройство, которое заставляет "шагать" по . Стандартом де-факто в области управления ШД являются . STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение - драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем - нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства - драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP - Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере - 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR - Потенциальный сигнал, сигнал направления. Логическая единица - ШД вращается по часовой стрелке, ноль - ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW - Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере - 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW - Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере - 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE - Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) - драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) - драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
Контроль перегрузок по току.
Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
— хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.

Рисунок 1
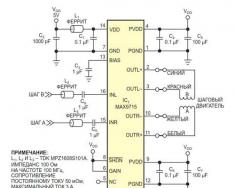
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Управление биполярным шаговым двигателем
Драйвер шагового двигателя своими руками — на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы развязки
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.

Таблица 1
Иллюстрация последовательности импульсов
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.
Схема драйвера униполярного шагового двигателя
, описанная в данной статье, реализует следующие задачи:
управление 4-фазовым униполярным шаговым двигателем.
обеспечивает плавную регулировку скорости вращения и изменение направления вращения.
выполняет функцию остановки двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.

Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.

Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.

Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы.
Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.

Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
(8,5 Kb, скачано: 1 451)
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод , с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель
это, как понятно из его названия, двигатель который вращается дискретными перемещениями
. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый
и микрошаговый режим
, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы
и старые матричные принтеры
. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297
и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref
надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298
, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298
сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать , про дайверы .
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.

Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки "+" и "–" (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер (транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно .
Управление контроллером достаточно простое.
- При активном сигнале "ВКЛ" (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе (сигнал ВКЛ активен) кнопки "+" и "–" меняют скорость вращения.
- Каждое нажатие на кнопку "+" увеличивает скорость на минимальную дискретность.
- Нажатие кнопки "–" - уменьшает скорость.
- При удержании кнопок "+" или "–" скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе (сигнал ВКЛ не активен).
- Нажатие кнопки "+" задает режим вращения в прямом направлении.
- Нажатие кнопки "–" переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку "–" в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.

Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.

Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить .
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).

То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть .
Схема контроллера с биполярным драйвером L298N выглядит так.

Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.

Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.

Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить .
Для Windows 7